A-V's 1967 AMC REBEL 770 4D SEDAN

So here's my
new AMC. As the title above it says, it's a '67 Rebel, top of the line model
770, with 4 doors. All in all, it's in pretty good shape, no real issues with
rust (only a few holes & some minor rustspots). It's not a new car, but I
gotta tell you that from the AMCs I've bought before, this one is in the best
condition out of any of them.

All the
'hard-to-find' parts are there, and most of them in good condition and I really
like the whole 'stance' of the car. It's got a mean looking body, no question
about it.

The Rebel
has a 232cid inline-six engine (3.8Liters) and a Borg-Warner M-43 Aluminium
Automatic transmission. The engine works just fine, even though I'll have to
work on it a bit, meaning not that it needs work, I'd just like to make it look
better after years of abuse.

Interior
is in good condition, as you can see from the pics. A few issues though. Most of
the electrics aren't original and all the insulation / carpeting is self-made,
and not something I want in my car. I'll propably get to work on the interior
quite soon, as it's very cold during the winters in Finland (and YES, I plan to
use this car during the winter...).
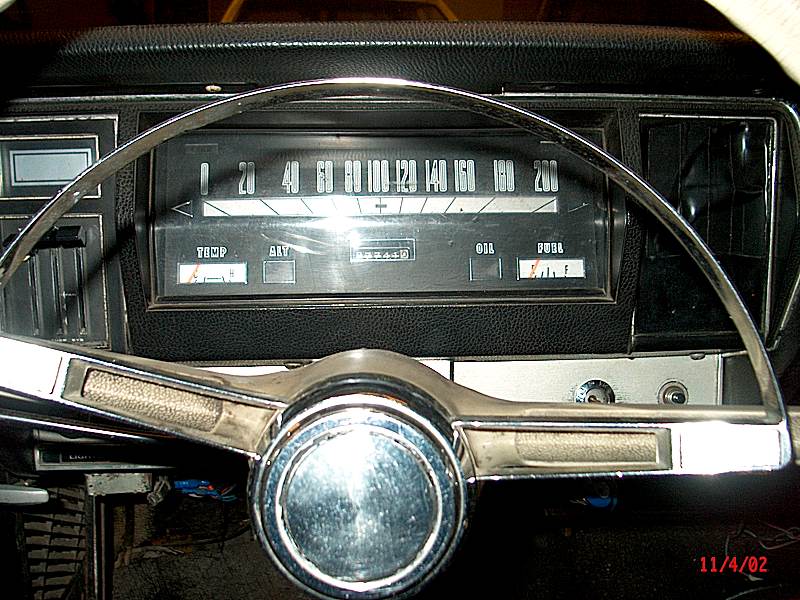
All
the instruments work, and even all the dashboard lights are operational. Quite a
suprise.

Seats
are intact, even if they need some serious cleaning.

Ok,
so in every car there's something you just can't stand. Here's my problem. Let's
hope I find a suitable shifter soon...

And
as you can see, the car had been in an accident some time back, front bumper
isn't as good as it looks from a distance, and I'll also need to replace the
driver's side headlight cover.

Rear
bumper is quite rusted, but still there are no holes in it. So I guess I'll
paint it soon if a suitable replacement isn't found easily.. I'll also have to
make the rear exhaust pipes.

Even if all
of the above are just small minor details, here's a bigger problem. The paint
itself is cracked and almost flaking off in some parts. As a first-aid kit, I'll
wax it thoroughly becouse I can't afford to paint the car until sometime next
summer... I'm thinking to do it in blue... dark blue I think..

And to
top it all off, here's a few shots of the car from the sides. Shows off the nice
condition vinyl-top quite nicely. I'll have to use some vinyl-treatment on it as
well...



Ok, and
here's a closeup of the wheels. Cragar G/T. The sizes are 14x7 in the front and
14x9 (!!) in the rear. Very cools rims indeed...